This article describes the main types of microgrid control architectures, including centralized, decentralized, distributed, and hierarchical approaches, and compares their characteristics and limitations. It also introduces hierarchical microgrid control, outlining primary, secondary, and tertiary control functions and the role of droop-based control in maintaining stable and coordinated microgrid operation.
Centralized Control
In centralized control, a central control unit is available to which all the other control units are connected. Generally, the central control unit is responsible for data storing. Other control units have access to the data stored within the central control unit. The central controller is also referred to as a central server. Setting up a centralized control system is relatively easy because of its simpler architecture. These systems can be easily maintained.
However, there are certain limitations associated with centralized control systems. If there is a failure of the central server or controller, the other connected control units cannot access data. In a centralized control system, other connected units depend on the availability of the central unit. This challenges the consistent performance of the control system by making it prone to single-point failure. With regard to the security and privacy of the other control units, there are also limitations introduced by a centralized control architecture.
Decentralized Control
Unlike centralized systems, decentralized systems do not have a central control unit. Instead of a single central server unit, there are multiple such units with data-storing and retrieving capabilities. The availability of multiple data access points means that the overall function of the control system is much more efficient in comparison to centralized systems. Decentralized control units remain in active status until all the server units fail. Overall, a server failure in a decentralized system may limit some of the control functions, but the performance is still advanced in comparison to centralized systems.
However, decentralized systems are also prone to failures if they are not designed to maintain their functions after a failure of one or more server units. Several data storing units may result in higher maintenance costs.
Distributed Control
Distributed systems are similar to decentralized systems, as these systems do not depend on a single central control unit. However, distributed control systems enable equal capabilities and data access for all the control units. The significance of distributed systems is the allocation of software and hardware facilities among all the control units to mitigate the functional effects of component failures. Distributed systems are flexible for modifications and expansions. Like centralized and decentralized systems, distributed systems suffer from data security and privacy concerns. In addition, resource allocation may result in higher maintenance costs.
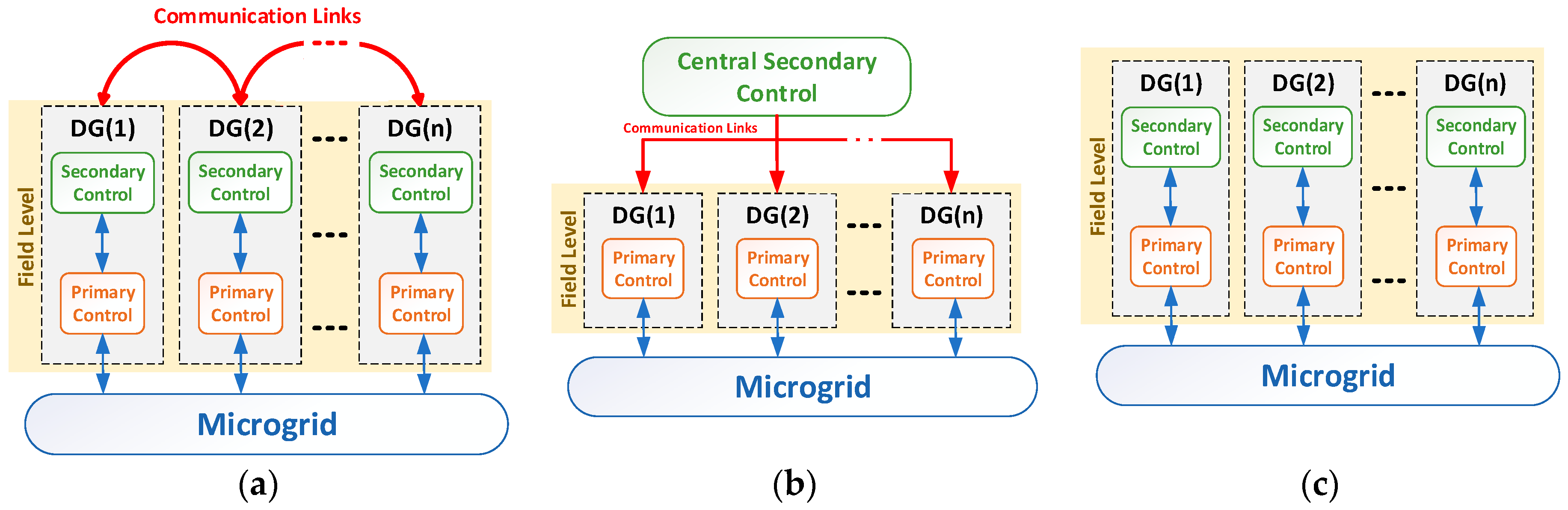
Figure 1. Microgrid control architectures: (a) distributed; (b) centralized; (c) decentralized.
Hierarchical Control in Microgrid
Microgrids can essentially be controlled in the same way as a main grid by using a three-level hierarchical control. The hierarchical control of a microgrid is presented in Figure 2. The three control levels are defined as primary, secondary, and tertiary, based on their speeds of response, operational timeframe, and other infrastructural requirements.
Primary control involves quick responses based on local measurements without communicating with other elements, and is based on droop control. For example, the detection of islanding and power balance is the function of primary control. As a result of the primary response, the rated frequency and voltage deviate from the nominal values. Secondary control is responsible for restoring the rated frequency and voltage of the microgrid. Tertiary control involves energy management functions of the microgrid, such as the economic dispatch of DERs, grid consumption minimization, the optimum utilization of energy storage units, and so on.
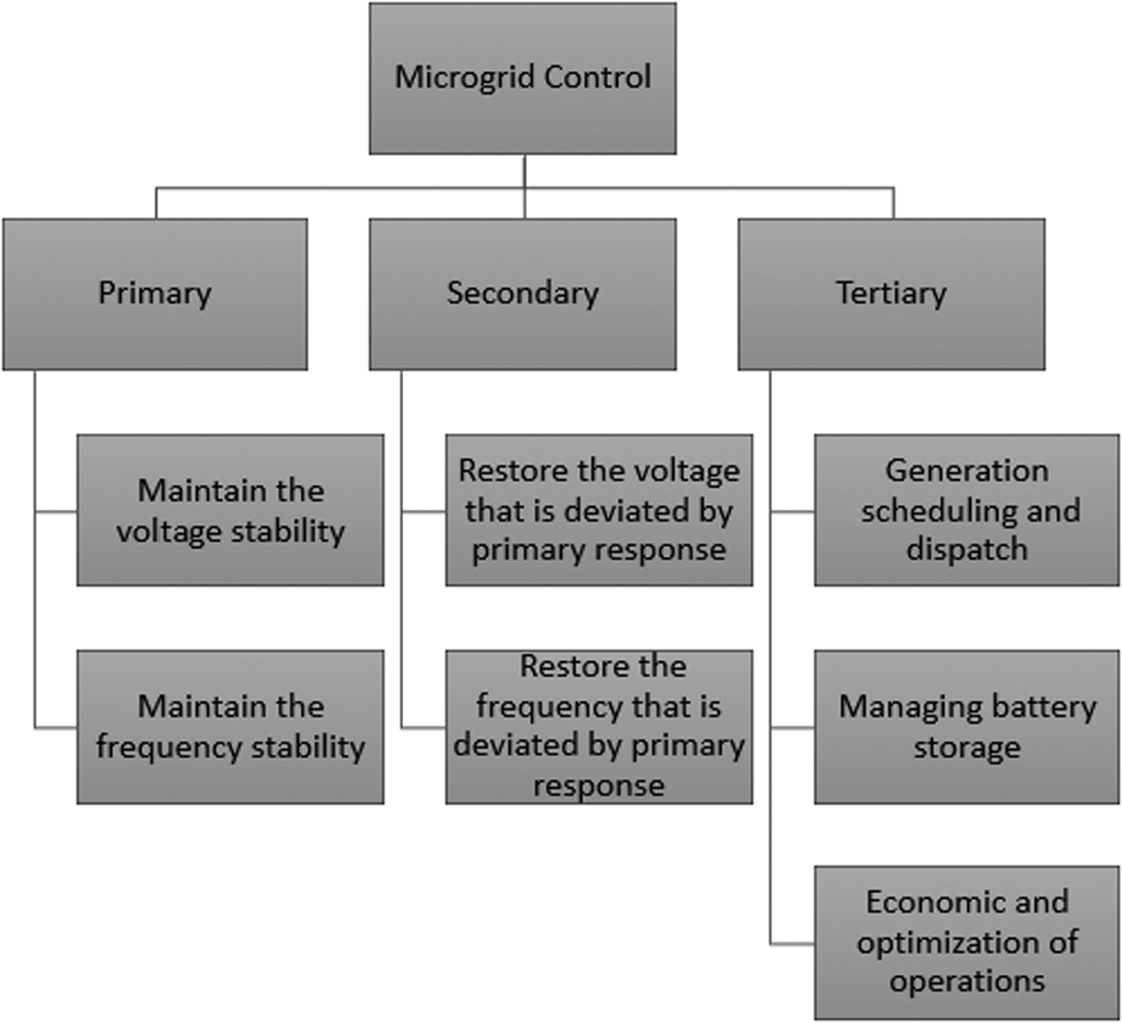
Figure 2. Microgrid control hierarchy
Droop Control
Droop control is a prominent method of primary control that adjusts the output active power of the controlled asset to regulate frequency. Droop control is the key to sharing demand across generators in autonomous microgrids where the utility grid is unavailable. Voltage source converters (VSCs) are frequently used in the islanded operating mode of microgrids. The microgrid’s voltage and frequency are managed by local control loops. Control techniques based on droop characteristics are commonly used to avoid circulating currents between parallel inverters connected to the microgrid.
The concept of proportional power sharing between synchronous generators in complex interconnected power systems led to the development of droop control approaches. There are two main droop control methods: frequency–active power (F-P) and voltage–reactive power (V-Q). The characteristics of F-P and V-Q droop controls are given in Figure 3.
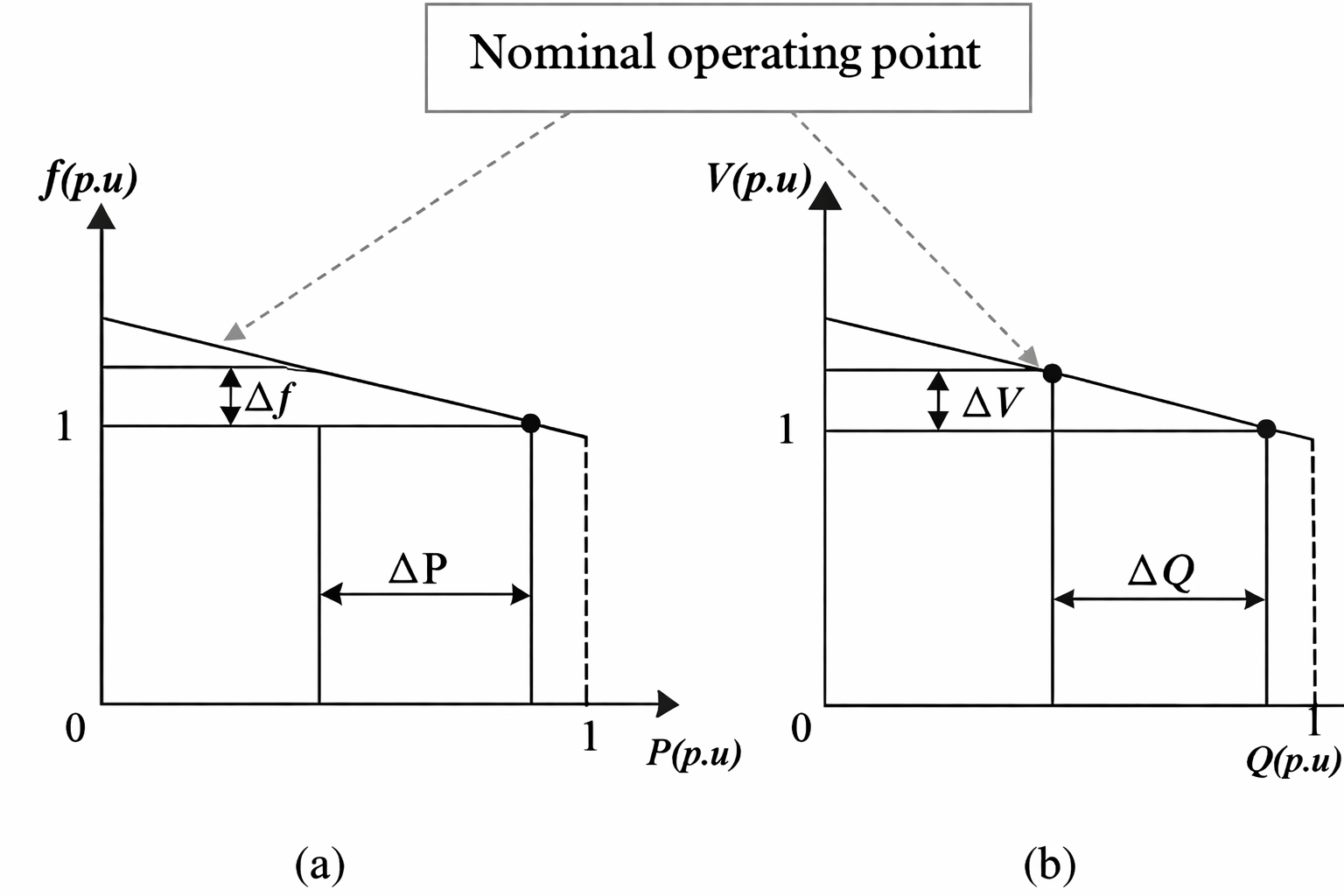
Figure 3. Droop characteristic curves: (a) frequency–active power (F-P) characteristic curve; (b) voltage–reactive power (V-Q) characteristic curve
An imbalance between a generator’s input mechanical power and its output electric active power creates a change in the rotor speed, which results in a frequency deviation. Similarly, variations in output reactive power cause the voltage magnitude to vary. The frequency–power droop control method is defined for conventional distributed generator units like synchronous generators, and it can be recreated in electronically interfaced distributed generating units as well.
Primary Control
Generally, primary control is based on responding promptly and relying solely on local measurements without communicating further with other control elements.
Microgrids rely heavily on power sharing. In general, power sharing implies sharing the load among paralleled distributed generating units in the microgrid, as well as sharing the load with the main grid by controlling the microgrid–main grid power exchange. Therefore, power sharing plays an important role at the primary control level. In addition, primary control is involved in islanding detection, controlling the power output, and so on.
Secondary Control
When disturbances occur as a result of the primary response, the frequency and voltage of the microgrid may change from their nominal values. Secondary control is responsible for restoring the rated frequency and voltage in the microgrid after such a primary control response in hierarchical control.
Tertiary Control
Tertiary control ensures a microgrid’s reliable, secure, and cost-effective operation, in both grid-connected and islanded modes. The energy management functions of a microgrid are optimized by the tertiary control, by taking the interaction between the microgrid and the utility grid into account. For example, operating the microgrid as an electrical island, resynchronization, and grid dependency of the microgrid involving power exchange between the microgrid and the main grid are some of the functions that are optimized through the tertiary response in hierarchical control.
Figure 4 shows how the nominal operating point of a generator varies with hierarchical control following primary, secondary, and tertiary responses. Let’s consider an islanded microgrid. The starting operating point is at the nominal voltage and frequency (1). When a deficit in power generation occurs as a result of a sudden increase in the demand for locally supplied real power and a change in reactive power, the grid-forming generator should adjust its contribution to cater for the increase in real power. This results in a decrease in the operating frequency. This initial change of the operating point from 1 to 2 is due to the primary response. At the second operating point (2), the operating frequency has deviated from the nominal frequency.
The secondary control restores the operating frequency to the nominal value, as in Figure 4, by changing the operating point from 2 to 3. As a result, the operation of the generator is shifted to a new droop characteristic curve. The tertiary response is an optional control based on the energy management function optimization of the microgrid, and changes the operating point from 3 to 4.
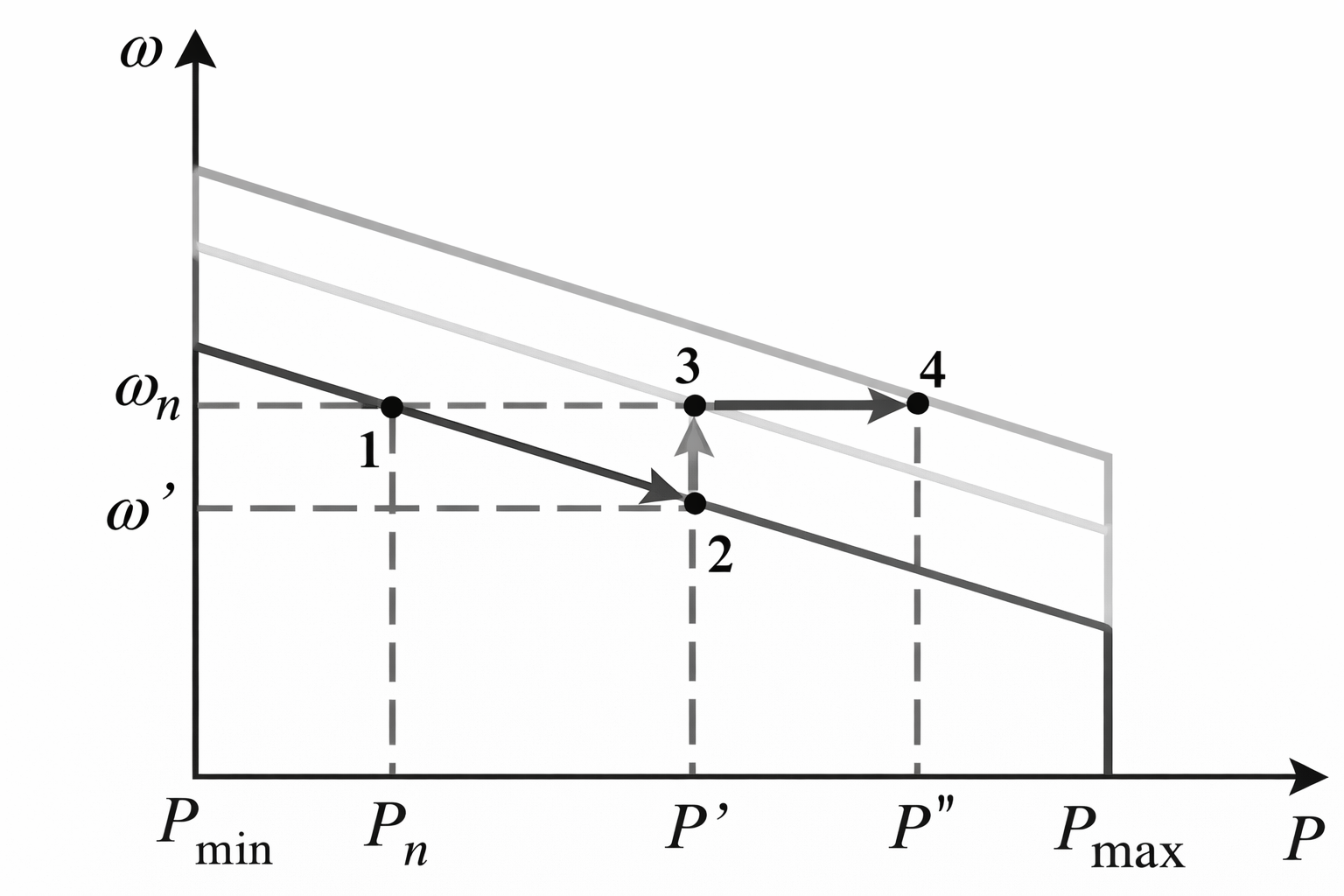
Figure 4. Primary, secondary, and tertiary control responses of hierarchical control
Key Takeaways
Understanding microgrid control architectures and hierarchical control strategies is essential for designing systems that are reliable, resilient, and capable of operating under varying grid conditions. The choice between centralized, decentralized, distributed, or hierarchical control directly affects scalability, fault tolerance, security, and operational efficiency, especially in microgrids with high renewable penetration. These control concepts enable practical applications such as community microgrids, industrial facilities, and critical infrastructure systems by ensuring stable power sharing, seamless islanding, and cost-effective energy management.