The article provides a comprehensive overview of the key information found on an induction motor nameplate, including specifications like horsepower, voltage, current, speed, efficiency, and NEMA classifications. It explains how these details are used to determine motor performance, sizing, and operational characteristics.
Figure 1 is a drawing of a typical induction motor nameplate. The electric motor nameplate contains a variety of information that can be used to calculate other items. NEMA specifies the information that must be included on the motor’s nameplate. The motor manufacturer may include additional information, such as the wiring information shown on the left side of the nameplate. Some of the items that must be included are described next.
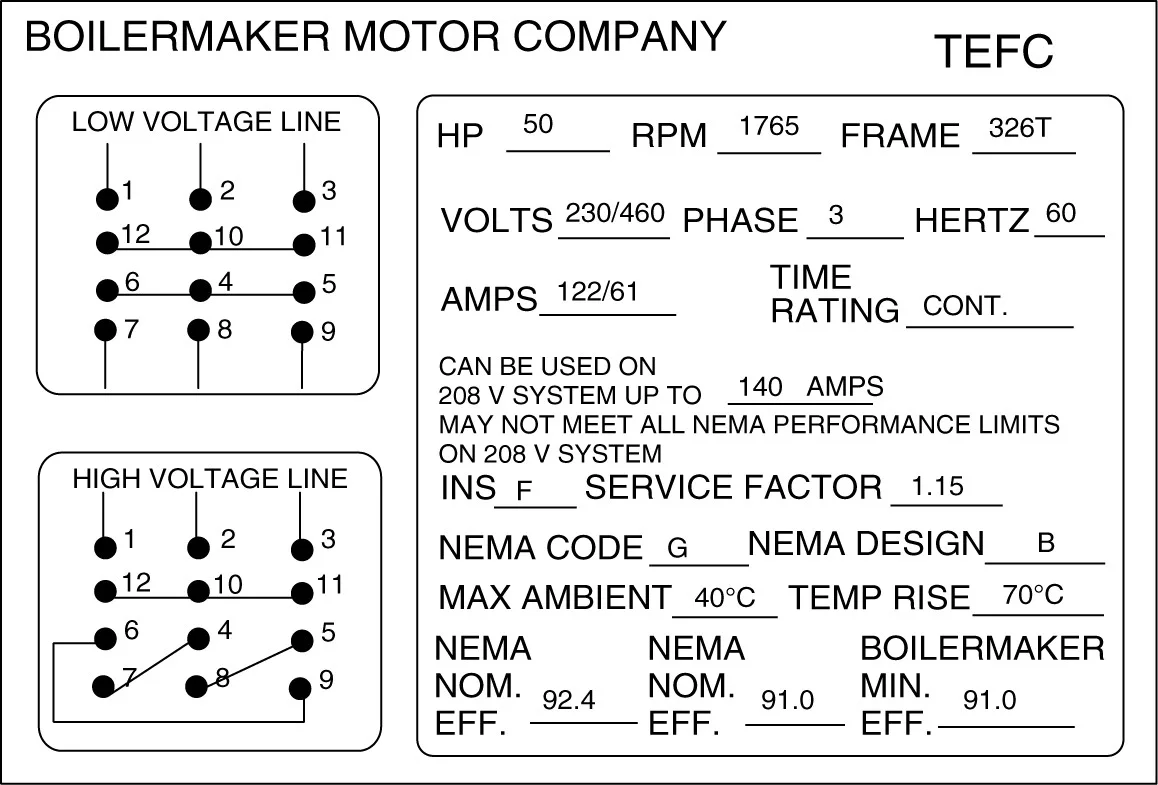
Figure 1: Typical induction motor nameplate information.
Manufacturer’s Type and Frame Designation
NEMA defines standard frame sizes. This name-plate shows a frame size 326T. The frame size provides a standard for details such as the location of mounting holes, a height of the shaft above the mounting plate, etc. This allows motors from different manufacturers to be used in the same location.
Rated Horsepower
This is the amount of power the motor is capable of delivering at the shaft on a continuous basis without exceeding its rated temperature. The example nameplate shows 50 HP. This does not mean the motor actually delivers 50 HP, however. The actual load will determine the power out of the motor. If the motor is fully loaded, the input to the motor will be larger than the rated horsepower, because the motor has losses.
NEMA defines a motor as small, medium, or large, depending on its frame size rather than its horsepower, because the same frame size can represent a different horsepower rating at different speeds Thus, the cutoff between small, medium, and large varies with the synchronous speed of the machine. At 1800 RPM, the standard horsepower ratings for medium poly-phase induction motors are: 10,15,20,25,30,40,50,60,75,100 125, 150, 200, 250, 300, 350, 400, 450, 500. Table 1 shows the minimum and maximum horsepower ratings that are considered to be medium-size induction motors as a function of the synchronous speed of the motor. Motors larger than the maximum sizes shown in Table 1 are considered to be large motors, whereas motors smaller than the minimum sizes shown in Table 1 are considered to be small motors.
| Synchronous Speed in RPM | Minimum HP size for medium Classification | Maximum HP size for medium Classification |
| 3600 | ½ | 500 |
| 1800 | 1 | 500 |
| 1200 | ¾ | 350 |
| 900 | ½ | 250 |
| 720 | ½ | 200 |
| 600 | ½ | 150 |
| 500 | ½ | 125 |
Rated Voltage
A three-phase motor nameplate always specifies the rated line-to-line voltage. Some motors are designed to operate at more than one voltage. This motor, for example, is rated 230/460, meaning it can be wired for operation at either voltage. This is accomplished by connecting coils in series for high voltage, or in parallel for low voltage. The rated voltage of a motor is somewhat lower than the nominal system voltage to allow for voltage drop in the wires feeding the motor. This motor is designed to operate on 240 volts or 460 volts systems. Allowing an approximate 5 % voltage drop yields the 230 and 460 volts ratings for the motor. Other standard voltage ratings for motors include 115 volts for 120 volts system, 200 volts for 208 volts system, and 575 volts for 600 volts systems. Induction motors should operate at voltages that are within ±10% of rated voltage.
Rated Current
This is the line current that the machine is designed to draw when it operates at rated load, rated voltage, and rated speed. In accordance with NEMA Standard MG-1, the current will be within 10% of this value when the motor is operated at rated frequency, voltage, and load. The ±10% tolerance allows for differences in manufacturing from one motor to another. Note that the nameplate shown in Figure 1 indicates that the motor can operate on a 208-volt system, although it will draw a higher current (causing more heat). The motor may not meet all of the NEMA requirements at 208 volts, however.
Rated voltage and current can be used to calculate the apparent power requirement for the motor, as shown by Example 1.
Example 1
What is the apparent three-phase power drawn by the motor of Figure 1 when operating at rated load conditions (assume 460 V operation)?
Solution
From the nameplate,
$\begin{align} & \left| {{V}_{LL}} \right|=460V \\ & \left| {{I}_{L}} \right|=61A \\\end{align}$
The apparent three-phase power is given by
\[\left| {{S}_{3\phi }} \right|=\sqrt{3}\left| {{V}_{LL}} \right|\left| {{I}_{L}} \right|=\sqrt{3}\left( 460 \right)\left( 61 \right)=48.6kVA\]
This 50 HP motor requires 48.6 kVA when operating at rated conditions.
Note:
A rule of thumb when figuring motor loads is that each horsepower of the motor load will require about 1 kVA of apparent power.
RPM
The RPM rating is the expected speed of the machine when operating at full load and rated voltage and frequency. Changes to the operating voltage or frequency will change the operating speed. The induction motor slows down slightly as the load is increased.
Once the horsepower and rated speed are known, it is possible to calculate the rated torque of the motor. The torque is important because many loads are sized by the torque they require, rather than the horsepower. Example 2 shows how the rated torque can be found from the rated horse-power and speed.
- You May Also Read: Transformer Nameplate Details Explained
Example 2
How much torque does the motor of Figure 1 deliver when operating at rated conditions?
Solution
In SI units,
$P={{\omega }_{r}}T$
Where ${{\omega }_{r}}$is the rotational speed of the rotor in rad/s (i.e., ${{\omega }_{r}}=2\pi \times {RPM}/{60}\;$)
So,
\[{{T}_{rated}}=\frac{{{P}_{rated}}}{{{\omega }_{rated}}}\]
Converting the rated power from horsepower to watts yields,
${{P}_{rated}}=50HP\times 746{}^{W}/{}_{HP}=37600W$
\[{{\omega }_{rated}}=2\pi \times {1765}/{60}\;=184.8{}^{rad}/{}_{s}\]
And
\[{{T}_{rated}}=\frac{37600}{184.8}=201.8N.m\]
Frequency
The frequency rating on the nameplate (in hertz) is the frequency at which the motor is designed to operate. The frequency that is applied to the stator winding will determine the synchronous speed of the motor. Some motors may be designed to operate at 50 or 60 Hz. but unless that is specifically indicated, always assume the motor will operate only at its rated frequency.
Maximum Ambient Temperature
This rating is the maximum ambient temperature at which the meter can provide rated load without exceeding its maximum operating temperature (indicated by the allowable temperature rise). The operating temperature is important because the life of the insulation is dramatically affected by temperature.
Insulation Type
The three main classes of insulation for electric motors are B. F. and H. The insulation used in the motor determines the maximum operating temperature for the motor.
NEMA Nominal Efficiency
Due to variances in the manufacturing process, not all motors of the same type will have the same efficiency. To account for such variations. NEMA Standard MG-l provides definitions of the nominal and minimum efficiency.
NEMA Design Letter
NEMA defines five standard designs for poly-phase induction motors, each of which has different characteristics. The five types are A, B, C, D, and E.
NEMA Code
This letter provides a means to calculate the locked-rotor RVA of the motor and thus the starting current. Locked rotor means the rotor is at standstill. This occurs normally when the motor is to be started; however, if the motor were to stall due to an overload, it would draw the locked-rotor current. The codes are shown in Table 2. Example 3 shows how the kVA code can be used to estimate the morons starting current.
| Code letter | kVA/HP at locked rotor |
| A | 0-3.14 |
| B | 3.15-3.54 |
| C | 3.55-3.99 |
| D | 4.00-4.49 |
| E | 4.50-4.99 |
| F | 5.0-5.59 |
| G | 5.6-6.29 |
| H | 7.1-7.99 |
| J | 7.1-7.99 |
| K | 8.0-8.99 |
| L | 9.00-9.99 |
| M | 10.0-11.19 |
| N | 11.20-12.49 |
| P | 12.5-13.99 |
| R | 14.00-15.99 |
| S | 16.0-17.99 |
| T | 18.0-19.99 |
| U | 20.0-22.39 |
| V | 22.4 and up |
Example 3
What is the expected starting line current for the motor of figure 1 when operating from a line to line voltage of 460 V?
Solution
From the nameplate, the NEMA code letter is G. From Table 2.For code G the expected locked rotor kVA is 5.6 to 6.29 kVA/HP. assuming the worst case, the locked-rotor (starting) apparent power can be calculated:
${{S}_{LR}}=Rated\text{ }HP\times \text{ }6.29kVA/HP$
Where SLR is the apparent power input to the motor at locked rotor.
${{S}_{LR}}=50\text{ }HP\times \text{ }6.29kVA/HP=314.5kVA$
Thus, the locked-rotor (starting) current is given by,
\[{{I}_{LR}}=\frac{{{S}_{LR}}}{\sqrt{3}\times \left| {{V}_{LL}} \right|}=\frac{314.5}{\sqrt{3}\times 0.460}=394.7A\]
Note
The starting or locked-rotor current is about 6.5 times the rated current. Depending on the design, today’s induction motors draw six to eight times rated current when starting.
Time Rating
This motor is rated for continuous operation, meaning it can run 24 hours per day. Any motor that runs longer than 60 minutes is considered to be continuously operating. For specials purpose applications, there are a short-time rating of 5, 15, 30, and 60 minutes.
Service Factor
The service factor is a multiplier used to determine the maximum allowable continuous load of the motor. For example, this machine has a service factor of 1.25. Thus it could provide 1.25*50 HP, or 62.5 HP, on a continuous basis.
Note:
When operated above the nameplate rating, the efficiency, current, and speed will differ from the nameplate values. Such operation may reduce the life of the motor insulation. Care must be taken to ensure that all applicable conditions, such as ambient temperature and altitude, are observed when utilizing the service factor.
Electric Motor and Induction Motor Nameplate Key Takeaways
Understanding the detailed information on an induction motor nameplate is crucial for a wide range of practical applications. These specifications—such as horsepower, voltage, current, speed, efficiency, and NEMA classifications—enable engineers and technicians to accurately assess motor performance, properly size motors for specific loads, and ensure safe and efficient operation. Knowing the rated torque and starting current helps in selecting appropriate control devices and protecting electrical systems from overload. Additionally, information like frame size and service factor supports compatibility and reliability in installation and operation under various environmental conditions.