The article provides an overview of the working principle, starting methods, and power and torque characteristics of synchronous motor. It also discusses how changes in excitation and load affect motor performance, supported by phasor diagrams and mathematical equations.
The synchronous motor is identical in construction to the synchronous generator, although virtually all synchronous motors are of the salient-pole type. Like all electric motors, the synchronous motor converts electrical power into mechanical power. The primary difference in operation, however, is that the synchronous motor only delivers torque and power when it is running at synchronous speed. It is a true, constant-speed motor, providing the electrical frequency is constant.
The disadvantage of the synchronous motor is that it requires an excitation system, which adds to the initial and recurring costs of the motor.
Like the synchronous generator, the synchronous motor can operate at various power factors, ranging from lagging to leading, which makes it useful for power factor correction.
One key difference between a generator and a motor, of course, is that a generator is driven by a prime mover, while a motor must start itself.
Starting a Synchronous Motor
The production of torque from a synchronous motor is the result of the interaction of the rotor field with the rotating stator field. The two fields rotate in synchronism, and the amount of torque produced is determined by the power angle.
When the machine is stopped, applying a balanced set of three-phase voltages to the stator windings would cause a rotating magnetic field in the air gap. If the rotor field coils were excited, the rotating stator field would sweep by the rotor poles, causing pulsating torques as the north and south poles alternated. Thus, the machine would not develop any starting torque.
In order to produce starting torque, the synchronous motor must have damper windings on the rotor. The damper windings, are similar to a squirrel-cage winding on an induction motor and thus can produce a starting torque. The induction torque causes the rotor to accelerate and is capable of bringing it up to almost synchronous speed.
- You May Also Read: Synchronous Generator Working Principle
During the starting period, the rotor field windings are normally shorted out. If the field windings were not shorted, the stator field would rotate past them, inducing large voltages at the slip rings. By shorting out the field winding, currents are induced in the field windings, resulting in some additional starting torque.
Once the motor is running at near synchronous speed, the excitation can be applied to the field windings. The mutual attraction between opposite poles on the rotor and stator results in a pull-in torque that locks the motor into synchronous speed.
The starting system for the motor should be capable of applying the excitation when the rotor poles are in proper position with respect to the stator field; i.e., the north poles of the rotor should be near the south poles of the stator field. If the opposite were true, large transient currents and torques would result that could damage the motor or shut down parts of the system that the motor is connected to.
Once the motor is running at synchronous speed, the damper windings do not carry any current, except during transients, in which case they serve the purpose of bringing the machine back to synchronous speed.
Other methods can be used to start synchronous motors, as well. Like the induction motor, a synchronous motor can be started with a variable-frequency drive, which would allow the excitation to be applied immediately, producing rated torque from zero speed up to the desired operating speed. In some cases, auxiliary motors are used to bring a large synchronous motor up to speed.
Power and Torque Relationships for the Synchronous Motor
Power equations
We look at the phasor diagram for the synchronous motor and find that the Counter-EMF lags the terminal voltage, as shown in Figure 1.
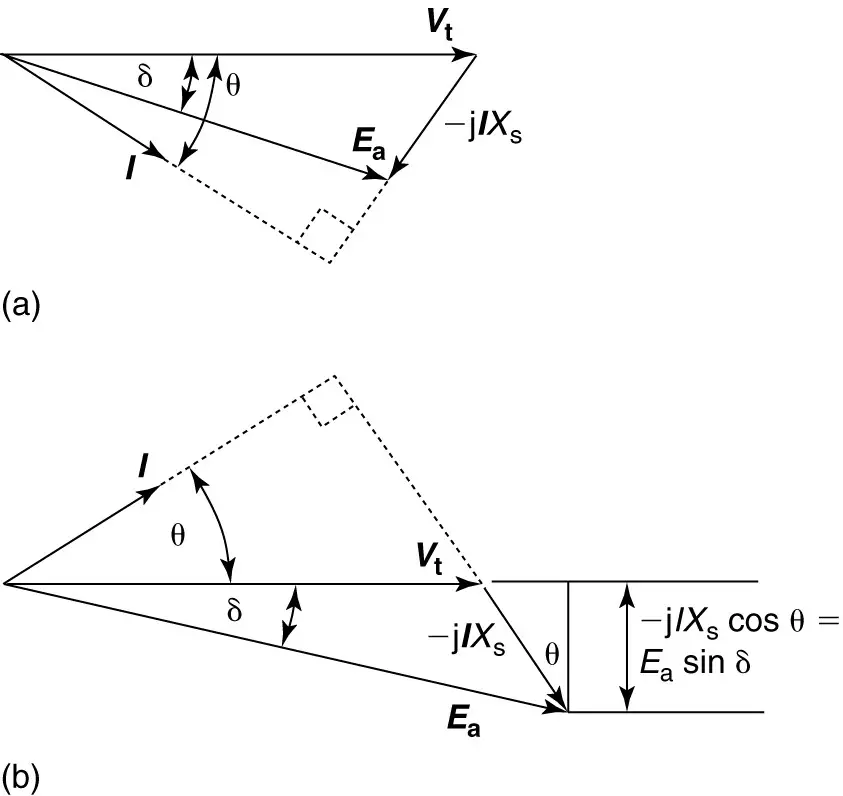
Figure 1: Phasor diagrams for a synchronous motor. a. Lagging current. b. Leading current.
In Figure 1(b), we note that the voltage drop across the synchronous reactance and the C-EMF both have components in the y-axis direction, but they are referenced in opposite directions:
$Ea\sin \delta =-jI{{X}_{s}}\cos \theta $
The equations that result for the synchronous motor are:
$\begin{matrix} {{P}_{3\phi }}=-3\frac{{{V}_{t}}{{E}_{a}}}{{{X}_{s}}}\sin \delta & {} & \left( 1 \right) \\\end{matrix}$
$\begin{matrix} {{Q}_{3\phi }}=3\frac{V_{t}^{2}-{{V}_{t}}{{E}_{a}}\cos \delta }{{{X}_{s}}} & {} & \left( 2 \right) \\\end{matrix}$
Because the motor is a load on the system, both real and reactive power are referenced positively into the machine. Looking at equation 1, we note that the power angle is negative and that the sine of a negative angle will also be negative, which cancels the negative sign in front of the right-hand side of the equation. Thus, the power is positive.
Similarly for the reactive power, if equation 3 is true, then the reactive power is positive and the machine is an inductive load:
$\begin{matrix} {{E}_{a}}\cos \delta <{{V}_{t}} & {} & \left( 3 \right) \\\end{matrix}$
While if equation 4 is true, the reactive power is negative and the machine is equivalent to a capacitive load.
$\begin{matrix} {{E}_{a}}\cos \delta >{{V}_{t}} & {} & \left( 4 \right) \\\end{matrix}$
As with the synchronous generator, the presence of salient poles adds a reluctance power term to the power equation:
$\begin{matrix} {{P}_{3\phi }}=-3\frac{{{V}_{t}}{{E}_{a}}}{{{X}_{s}}}\sin \delta -V_{t}^{2}\left( \frac{{{X}_{d}}-{{X}_{q}}}{2{{X}_{d}}{{X}_{q}}} \right)\sin 2\delta & {} & \left( 5 \right) \\\end{matrix}$
Since the power angle is negative, both terms on the right-hand side of equation 5 are positive. Thus, the magnet power and reluctance power add together, in the same fashion as for the generator.
Torque Production by the Synchronous Motor
The torque developed by a synchronous motor can be found by dividing equations 1 or 5 by the appropriate speed. The developed torque in N-m can be found from the power in watts and the RPM:
$\begin{matrix} {{T}_{dev}}=\frac{30}{\pi {{n}_{r}}}{{P}_{3\phi }}\text{ N}\text{.m} & {} & \left( 6 \right) \\\end{matrix}$
To find the torque in lb ft, the power can be expressed in horsepower:
$\begin{matrix} {{T}_{dev}}=\frac{5252\times HP}{{{n}_{r}}}\text{ lb}\text{.ft} & {} & \left( 7 \right) \\\end{matrix}$
The power equation, in conjunction with the phasor diagram, provides us with insight into the operation of the synchronous motor.
Note the maximum torque for a given excitation occurs when the power angle is 90° for a round-rotor motor and somewhat before 90° for a salient-pole motor. The maximum torque is called the pullout torque because adding load beyond that value pulls the motor out of synchronism.
The effect of excitation changes
In equation 1, we note the terminal voltage and the synchronous reactance are constant. Thus, the only variables that change are the C-EMF and the power angle. If the real power delivered by the motor is held constant, then these two quantities must change in opposite directions, specifically:
$\begin{matrix} {{E}_{a}}\sin \text{ }\delta \text{ =constant} & {} & \left( 8 \right) \\\end{matrix}$
The effect of changing the excitation at constant load is shown by the phasor diagram of Figure 2. The solid phasors show the initial operating condition, in which the motor is under-excited and operating at a lagging power factor.
The excitation is then increased to the new operating condition shown by the dashed phasors. At the new operating point, the motor is overexcited and delivers reactive power to the supply. Note that the new phasor Ea2 has the same vertical component as Ea1 which means that (Eacosδ) is constant. Likewise, the components of current that are in phase with the source voltage are the same:
\[\begin{matrix} I\cos (\theta )\text{ }=\text{constant} & {} & \left( 9 \right) \\\end{matrix}\]
Thus, the dotted lines shown in the phasor diagram represent constant-power lines. If the power is constant, then the tip of the CEMF phasor will end on the horizontal constant-power line and the current phasor will end on the vertical constant- power line.
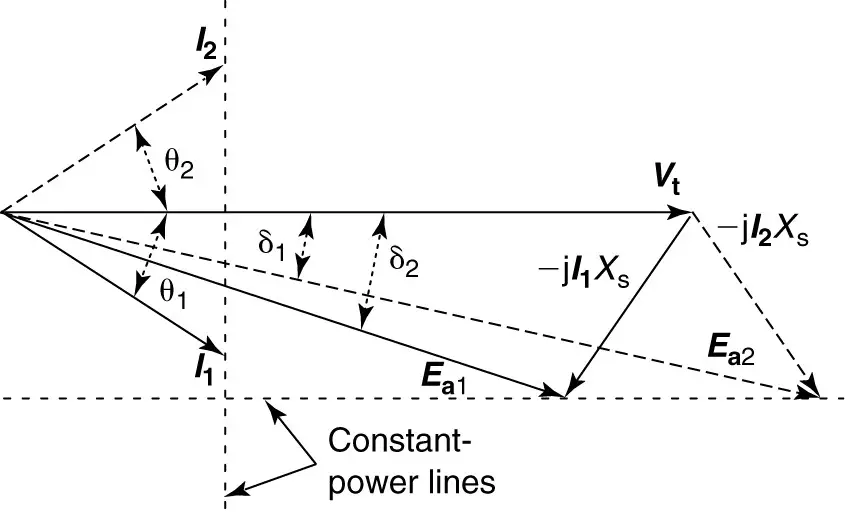
Figure 2: Phasor diagram for synchronous motor showing the effect of changing excitation at constant load.
The effect of changing load at constant excitation
When the load changes on the motor, then the tip of the C-EMF phasor must move to a new level, either higher or lower, depending on the load change.
Furthermore, if the excitation is not changed, then the magnitude of the C-EMF will remain the same.
Figure 3 is a phasor diagram with the initial operating condition shown by solid phasors. The load is cut in half, at constant excitation, resulting in the new phasor diagram shown by the dotted phasors.
The C-EMF traces a circular path as it moves from the original condition to the reduced load, and the constant-power line at the new operating point is half as high as the original constant- power line.
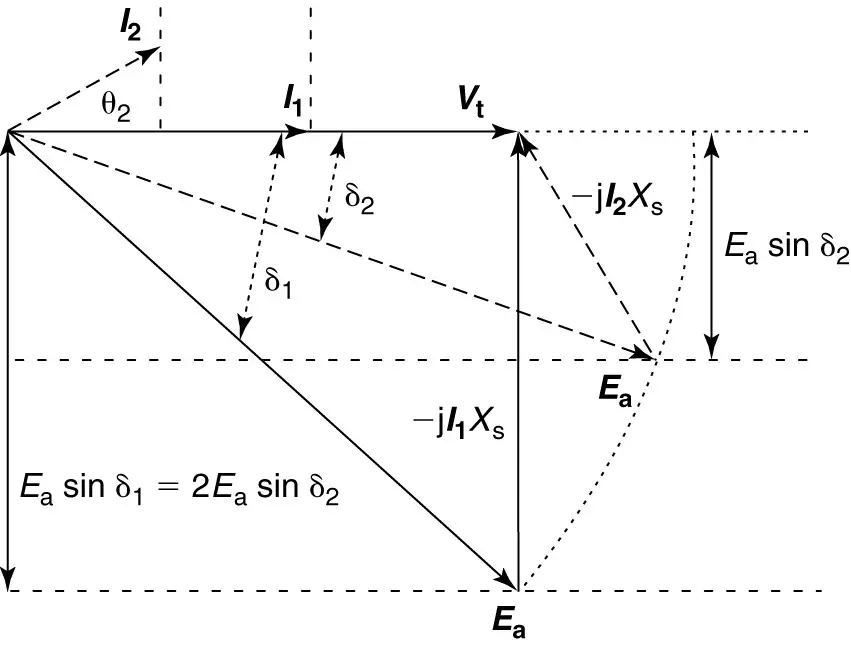
Figure 3: Phasor diagram for a synchronous motor showing the effect of changing the load with constant excitation.
Synchronous Motor Key Takeaways
Understanding the working principles, starting methods, and power-torque characteristics of synchronous motors is essential due to their critical role in various industrial and power system applications. Their ability to operate at constant speed regardless of load changes makes them highly valuable in precision-driven environments such as paper mills, textile industries, and robotics. Additionally, their capacity to operate at both lagging and leading power factors makes them instrumental in power factor correction, which helps improve the efficiency of electrical power systems. The effects of excitation and load variations on motor performance, as demonstrated by phasor diagrams and equations, allow engineers to optimize motor operation for stability, efficiency, and reliability.