The article discusses the classification, construction, and components of electric motor, covering different mechanical structures (rotating cylinder, rotating frame, rotating disc, linear, and MHD drive), enclosure types, cooling methods, mounting options, and coupling mechanisms. It also explains key parts like rotors, stators, bearings, terminals, and protection standards such as the IP code.
Electric machines are split into groups based on the type of electricity they require, DC, AC, single phase or three phase, and on their basic mechanical structure. The following types are all used, though not all are common.
Rotating Cylinder
By far the most common type has a rotating part inside a stationary part. The rotating part is called either a ‘rotor’ or an ‘armature’ and the stationary part is known as the ‘stator’, though it may be referred to as the ‘fields’.
Rotating Frame
This type of machine may sound inside-out but it is commonly used in domestic and commercial ceiling fans (Figure 1). The outside rotates with the fan blades attached to the rotating part, while the magnetic force is provided by the internal stationary part. This is convenient as the electricity is connected to the inner stationary part.

Figure 1 Fan motor
Rotating Disc
Small electric motors in electronics, particularly entertainment and computer devices, have a type of motor where the rotating part is a flat disc, sometimes made from flattened coils or coil windings, printed onto a printed circuit board (Figure 2). The concept has also been used in larger industrial disc motors where a large round platform is driven directly by a circle of magnetic coils under the disc.

Figure 2 Pressed disc or PC motor
Linear (flat)
Linear motors, which are basically a conventional design split at some point and laid flat, have become the ‘new’ motor of the late twentieth century, powering high speed trains and other applications as their use increases.
Linear (tubular)
If the linear motor is wrapped around a hollow core, this time with the direction of travel aligned with the axis of the tube, a tubular motor is created. This can be used on a solid iron shaft. One use could be as an electric cannon but other industrial applications are possible.
Magneto Hydrodynamic (MHD) Drive
The MHD drive uses a very strong magnetic field to propel a fluid such as water through the field (Figure 3). The movie Hunt for Red October is based on the concept of a submarine using MHD as a propulsion system. Although proclaimed as fiction, the MHD drive has been featured in Russian textbooks since the 1960s.

Figure 3 Magneto hydrodynamic drive at the Tokyo Maritime Museum of MHD
Enclosure Types
If most electric motors consist of a shaft on a pair of bearings, then a means of mounting such a central shaft is required. Older electric motors had the bearings supported by pedestals, so the motor spun between the pedestals and the stationary magnetic coils were mounted to encircle the rotating part. It probably looked like a bullock yoke (the harness worn by bullocks pulling drays), and so it was originally called the ‘yoke’.
Later the term ‘frame’ became more popular as the outside was more extensive, but still not enclosing. Today the term generally used is the ‘enclosure’.
A number of different frame types are shown in Figure 4. Open frame or open enclosure refers to an electric motor that is usually larger, in a secure position, and generally considered ‘out-of-reach’. Older motors had little or no protection against unintentional access and would not be tolerated by OHS nowadays.
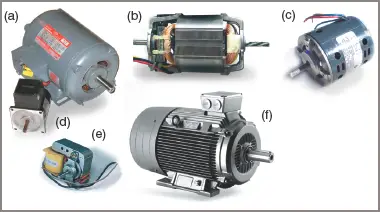
Figure 4 Frame types: (a) drip-proof, (b) open frame, (c) IP10 frame, (d) small enclosed, (e) open frame shaded pole, (f) totally enclosed fan cooled
Open drip-proof electric motors are a little better, especially as they protect against falling water, though not against vertically splashing water. Their openings prevent water from dripping inside the motor.
Guarded motors have screens or grids to prevent access to the live inner parts of a motor. These grids are normally on the ends so the motor is essentially drip proof and safe from animal access.
Splash-proof electric motors are similar but protected against water splashing up at an angle up to 100° from the vertical.
Totally enclosed electric motors prevent air from flowing from the inside to the outside and vice versa. This helps protect the motor from water, dirt and various types of animals and insects, but it also stops the airflow from cooling the motor. The motor must rely on conduction to adjacent surfaces or radiation and convection to external airflow.
Totally enclosed naturally cooled (TENC) motors may have fans to encourage natural airflow to assist cooling the motor. They are normally used on low power or intermittent loads to allow for natural cooling.
Totally enclosed fan-cooled (TEFC) motors are the most common type of industrial motor. TEFC motors usually have one or two internal fans that circulate the air within the motor and an external fan, usually within an end fan cover, that blows cooling air over the external fins.
Totally enclosed blower-cooled (TEBC) motors have an external blower fan that cools the motor. The blower can be used continuously or just when the motor needs extra cooling. The blower may run after the motor is turned off, perhaps until it cools down to a set temperature.
Encapsulated motors have the winding enclosed within an epoxy or silicon rubber compound, usually as protection against dust, moisture, chemical atmospheres or high-level vibrations. The coil ends might be the only parts that are enclosed or the whole stator might be enclosed within a vacuum and baked hard.
Submersible motors are constructed in such a way that water cannot enter, even at some depth underwater. Pump motors are often submersible.
Explosion-proof electric motors are designed to withstand an explosion and prevent gases from an explosion igniting. Explosion-proof motors may be used in explosive atmospheres like those found in mining and petroleum industries. These motors are constructed with narrow gaps between parts, which allow any hot gases from internal faults to exit the frame in such a way that the heat is removed from the gas so it does not ignite.
International Protection (IP) code
The International Protection code or Ingress Protection rating is an international standard covered by IEC 60529 and also in the Australian Standard AS/NZS 60529. The IP code consists of the letters IP followed by two digits and an optional letter.
IP classifies the degrees of protection provided against the ingress of solid objects (including body parts such as hands and fingers), dust and water in enclosures, particularly electrical enclosures. The Standard aims to clarify vague marketing terms such as waterproofing. The digits indicate conformity with the conditions summarized in Table 1. Where there is no protection rating the digit is replaced with the letter X.
Table 1 International Protection Code
| First number | Degree of protection | Second number | Degree of protection |
| 0 | No protection against any contact with live or moving parts of solid foreign objects. | 0 | No protection |
| 1 | >50 mm: protection against accidental contact with any large surface of the body, such as the back of a hand, but no protection against deliberate contact with a body part. | 1 | Protection against dripping water (vertically falling drops). |
| 2 | >12.5 mm: protection against contact by fingers or similar objects. | 2 | Drip-proof: protection against vertically dripping liquid when the enclosure is tilted at an angle up to 15° from its normal position. |
| 3 | >2.5 mm: protection against contact by tools, thick wires, etc. | 3 | Rain-proof: protection against water falling as a spray at any angle up to 60° from the vertical. |
| 4 | >1 mm: protection against contact by most wires, screws, etc. | 4 | Splash-proof: protection against liquid splashing against the enclosure from any direction. |
| 5 | Dustproof: complete protection against contact: ingress of dust is not entirely prevented, but it must not enter in sufficient quantity to interfere with the satisfactory operation of the equipment. | 5 | Jet-proof: protection against water projected by a nozzle against the enclosure from any direction. |
| 6 | Dust-tight; complete protection against contact: no ingress of dust. | 6 | Protection against water projected in powerful jets against the enclosure from any direction. |
| 7 | Immersion up to 1 m: protection from ingress of water in harmful quantity. Ingress shall not be possible when the enclosure is immersed in water under defined conditions of pressure and time (up to 1 m of submersion). | ||
| 8 | Immersion beyond 1 m: protection for continuous immersion in water under conditions which shall be specified by the manufacturer.
Note: Normally, this will mean that the equipment is hermetically sealed. However, with certain types of equipment, it can mean that water can enter but only in such a manner that produces no harmful effects. |
The first number indicates the level of protection that the enclosure provides against access to hazardous parts (e.g. electrical conductors, moving parts) and the ingress of solid foreign objects. The second number indicates the degree of protection of the equipment inside the enclosure against harmful ingress of liquids.
For example, an electrical socket rated IP22 is protected against insertion of fingers and will not be damaged or become unsafe during a specified test in which it is exposed to vertically, or nearly vertically, dripping water. IP22 or IP2X are typical minimum requirements for the design of electrical accessories for indoor use.
End Covers
Machine end covers are not just the cover at each end of an electric motor but the means of mounting the bearings, and therefore the shaft, in such a way that the rotor is kept central to the stator and does not allow the rotor excess movement lengthways either.
The end cover may have a grease nipple fitted to supply the bearing, and may hold a wave washer or spring washer intended to put some pressure on the end of the shaft to take up excessive movement as the shaft and motor heat and cool. End covers may be ventilated, or sealed. Some electric motors are mounted by the end covers. The end cover for a three-phase motor is shown in Figure 5.

Figure 5 Typical end cover
Spindle
The shaft of an electric machine is also known in mechanical terms as a spindle. The spindle is usually mild steel, but may be a higher tensile strength depending on the duty of the motor and the cost, that is, a heavy-duty motor would be expected to have better quality materials. A typical spindle is shown in Figure 6.
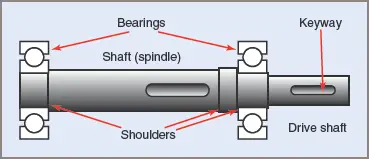
Figure 6 The basic spindle
Rotor Laminations
When an alternating magnetic field cuts any metal, eddy currents are produced that cause heat losses. Rotors are constructed from laminations to reduce these losses. The laminations have slots punched through the individual sheets so that a stack of laminations have the slots lined up when pressed onto the rotor shaft. The windings are mounted into these slots.
Most electric motors, up to quite reasonable sizes, have the laminations mounted directly on the motor shaft. This is a simple method that also has benefits in strength and magnetic properties, but as size increases, weight and cost become more important to the design, and mounting spiders are used. Figure 7 shows two common types of rotor laminations.
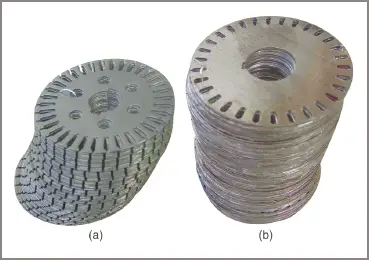
Figure 7 Rotor laminations: (a) wound, (b) squirrel cage
Rotor Spider
Larger electric motors have a hub onto which the laminations are mounted. This saves on lamination materials, reducing their weight, and allows for improved cooling and greater rigidity of the laminations. (See Figure 8.)
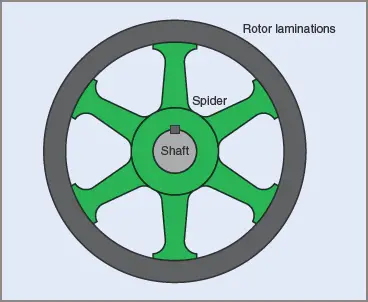
Figure 8 Rotor spider
Shaft Deflection—Poling
When an electric motor has been running for an extended period, the heat soaks through into the shaft and other parts, so the motor is at an almost constant temperature throughout its structure. When turned off it can be quite hot.
If the motor is suddenly motionless, the heat and weight of the rotor can cause a shaft to deflect under gravity and remain that way when cooled until it is next used. The rotor will be off-center and therefore unbalanced and rotational speed will add to the forces to increase the deflection. The rotor may then scrape against the stator causing more heating from the friction.
Excessive poling damages not only the rotor and stator surfaces, but can lead to failure of the winding insulation (see Figure 9). Electric Motors that are prone to shafts bending are often run off load until they cool down, or use poling motors to keep the shafts turning until the machine has cooled.

Figure 9 Example of poling damage to winding laminations
Bearing Positioning—Retention
While bearings are simply pressed onto most motor shafts and may simply sit in the end housing without any form or retention device, larger electric motors have bearing caps that forcibly retain the bearing in the housing, in the expected position. Some shafts have a ‘keeper’ ring or threaded ring or nut to hold bearings on the shaft.
Bearings
The bearings in modern motors are almost the only moving parts and the part that will need servicing first, perhaps after thousands of hours operation.
Bushes
Bushes are the load-bearing sleeves, usually bronze, that provide a softer material in which the shaft rotates without significant wear on its own surface. Bronze bearings usually have oil supplied from a reservoir to lubricate the working surfaces. Bronze bearings are suitable for smaller low power motors while nylon or other plastics can be used for very low power motors. (See Figure 10.)

Figure 10 Bearing types
Older higher powered electric motors might still use bearings coated with white or Babbitt metal. Motors using bushes are now uncommon as most modern motors use one or another form of ball or roller bearing.
Ball Bearings
Ball bearings (Figure 11) are the most common form of roller bearing and they are used almost exclusively in modern motors, including very large electric motors. The actual bearings are solid hard steel balls, polished to an accurate spherical shape, running between an inner and outer race. The balls are hardened and ground to tight tolerances.

Figure 11 Ball bearings
Ball bearings are relatively cheap to manufacture and provide a very long life if correctly lubricated. They may run in grease or oil or may be pre-lubricated and sealed. In continuous service they may run for as long as five years before requiring maintenance. Most industrial electric motors would have a cyclic maintenance performed in that period including a visual check, cleanout and bearing change.
Roller Bearings
Heavy-duty motors requiring substantial mechanical strength would use roller bearings (Figure 12). Roller bearings are not ball shaped but ‘barrel’ shaped to act as if much larger balls had been used instead. They run in races as for ball bearings, ground to suit the much larger radius of the rollers. Some roller bearings are almost cylindrical in shape but true cylindrical bearings are called ‘needle’ bearings. Very large motors use roller bearings.

Figure 12 Roller bearings
Thrust Bearings
When an electric motor has a significant end thrust force, thrust bearings must be used to prevent the rotor from being pulled out of the motor. Vertically operated motors must support the weight of the rotor, at least at stand-still, start-up and shut-down.
Some electric motors have two bearings, one to contain the rotation to the axis of rotation, and a second bearing to support the weight or thrust of the end force. The bearing races are usually made at an angle so the balls or rollers are supported both axially and radially.
Some large vertical electric motors may also have oil-lubricated white metal thrust bearings that support the weight of a vertical shaft when the motor is standing still, while allowing the magnetic field to ‘pick up’ the rotor during operation.
Mounting
Electric Motors require some form of mounting (Figure 13 overleaf) to support the motor against the reaction to the forces it generates to the load.

Figure 13 Types of electric motor mount
Foot Mounted
Most electric motors were traditionally, and still are, foot mounted, meaning that a set of feet or a single flat surface is molded or welded to the side of the motor frame. Foot mounting allows the position of the motor to be adjusted sideways and endways to allow for lining up of a belt or gear and tensioning the belt or fully engaging the gear. Note that spacer shims are sometimes required to adjust the height of a motor to align for an axial driver.
Face Mounted
Face mounted or flange mounted electric motors have the mount molded or machined onto the end housing so a motor can be accurately mounted into a mating hole in a machine, or directly onto a coupling or extended shaft. Face mounting also places the shaft within an enclosure making human access less likely so it is therefore safer.
Shaft Mounted
Some machines clamp to the shaft of an electric motor so the frame or enclosure rotates. Domestic ceiling fans are a typical example of this but some machine drives use the same method in compact applications. Modern direct drive washing machines may use shaft mounted motors.
Quill Mounted
The electric motor itself is cylindrical, and quill mounted motors have the whole motor clamped around its body. Applications include high-speed grinder spindles and die grinders in CNC machines. The motor can be easily adjusted endwise but axially it is clamped accurately in the center of the clamp.
Cooling
All electric motors generate heat in the process of converting electrical energy into mechanical energy.
Natural Convection
When natural convection, and presumably radiation and conduction, was all that was provided it allowed only modest power to be generated and limited the endurance of electric motors. Early motors did not have the cooling fans of modern motors. Some modern motors used within machinery rely upon natural cooling, mainly from conduction through associated parts and the frame of the machine.
Forced Convection
Forced convection uses air that has been blown by a fan provided either as a part of the electric motor or as an added or auxiliary function. The air is either circulated within the motor or, in the case of TEFC motors, forced over the outside of the motor. Figure 14 shows a motor with forced cooling.

Figure 14 An air-cooled electric motor. The cooling ducts can be seen at each end.
Totally Enclosed Fan Cooled
TEFC motors (Figure 15) that have been described above usually have both internal and external fans as a normal part of the motor. This is the most common type of electric motor cooling.

Figure 15 Totally enclosed fan-cooled electric motors
Liquid Cooled
Larger electric motors may have cooling water, or another liquid, pumped through the stator and sometimes the rotor to remove heat rapidly and efficiently. Only the highest power density motors or generators would require this method.
Gas Cooled
Some special applications, such as high power generation, may use nitrogen or other gases to cool the generators, sometimes pumping the coolant through tubular conductors.
Coupling
The energy converted into mechanical form must be coupled with the machinery the electric motor is driving, or conversely, coupling the mechanical energy to the generator.
As direct-coupling a motor to a machine can cause sudden mechanical shocks, couplers have been developed that absorb some of the initial shock. Three types are shown in Figure 16.
Electric Motors may be mounted directly to a gearbox to provide greater torque at a lower speed or a greater speed at a lower torque. Gearboxes are mounted either axially or as a spur gear drive. Planetary gearboxes are typically fitted to provide a high-torque, small, physical drive gearbox.

Figure 16 Three types of anti-shock coupler
Direct-Mounted Load
In many cases the load is mounted directly onto the drive end of the shaft. Fans and pump impellers are common loads that would be direct mounted. Grinding wheels are another direct-mounted load and many machines have an extended shaft mounted directly onto the motor shaft. In Figure 17(a) a fan has been mounted directly onto the shaft of the electric motor.

Figure 17(a) An electric motor with a direct-mounted load
Direct-Mounted Coupling
A coupling wheel, such as a pulley or gear, may also be mounted directly to the drive end. Pulleys may be used with flat belts, vee belts, cogged belts or serpentine belts. Chain drives can also be used but generally only with lower speed motors.
Universal Couplers
Universal couplers allow a shaft to be connected to another shaft that is not accurately aligned to the first shaft. The change in angle is limited to a few degrees. Universal joints may be the cross type commonly found on motor vehicle propeller shafts, as shown in Figure 17(b) overleaf, or the ball type commonly found on the front wheel drive shafts of modern automobiles.
For low-power duty, rubber drive blocks might be used or rubber tubing may be clamped onto the electric motor shaft and drive shaft.
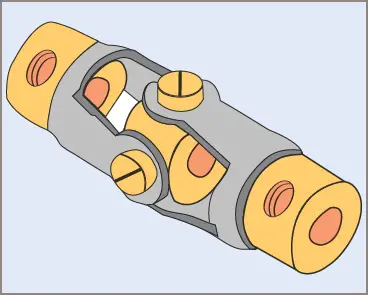
Figure 17(b) Universal coupler
Anti-Vibration Couplers
When a load has vibrations that might cause damage to an electric motor, or a load is particularly sensitive to vibrations, a rubber-insulated coupler is used to transfer the power but stop vibrations from being transferred. Typical anti-vibration couplers are shown in Figure 17(c).

Figure 17(c) Anti-vibration couplers
Fluid Coupling
Electric Motors may have a hydraulic fluid coupler (Figure 17(d)), similar to that used in automotive automatic transmissions, to allow the motor to start and gather speed before the power is transferred to the load. The load accelerates but often does not reach the full speed of the motor due to ‘hydraulic slip’.
Another advantage of hydraulic drives is that sudden shocks from the load are not transferred to the motor and in particular to the windings. If the load should suddenly jam, the electric motor simply senses added load and protection may be used to shed hydraulic pressure. Rock crushers, metal shears (guillotines) and other sudden impact loads would benefit from the use of hydraulic couplers.

Figure 17(d) Fluid coupler
Eddy Current Couplers
Eddy current clutches or couplers have a pair of discs or drums that rotate in close proximity to one another with a magnetic source such as a permanent magnet or electromagnetic coil mounted on one of the disks or drums. An eddy current coupler is shown in Figure 17(e).
As the electric motor rotates, eddy currents are set up in the opposing disc or drum so that it is dragged along with the magnetic field. This magnetic slip allows a highly loaded motor to start without the load and then to pull up the load as the speed increases.
In some cases the eddy current clutch is energized to a higher level thus engaging the clutch at full load speed, fixing the two shafts together mechanically.

Figure 17(e) Eddy current coupler
Mechanical Clutch And/Or Brake
A mechanical clutch may be used to engage an electric motor or disconnect the motor as required. Larger lathes have a clutch that allow the motor to continue running without driving the chuck.
On some lathes operating the clutch lever disconnects the drive from the chuck and also brakes the chuck to stop it rotating in a shorter period of time. Many machines also use a brake to stop the machine when power is disconnected to prevent damage to the machine or product.
Electromagnetic Clutch And/Or Brake
As with mechanical clutches and brakes, the electromagnetic version uses an electric current to engage the clutch or brake. The disadvantage is that loss of power may prevent the magnetic device from operating, but this may be used as a safety feature by automatically disengaging the motor or activating the brake during power failure. An electromagnetic brake is shown in Figure 18.
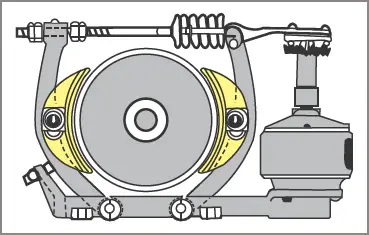
Figure 18 Electromagnetic brake
Terminals
Most electric machines have a terminal box where the electricity is supplied to the electric motor. The terminal box will contain a terminal strip, terminal bolts or simply wires and connectors to join the external wiring to the motor windings (see Figure 19). The terminal box protects the connections, insulates for protection and anchors the cables.

Figure 19 Typical electric motor terminal box
Electric Motor Parts and Construction Key Takeaways
The diverse classifications, constructions, and components of electric motors play a crucial role in their wide-ranging applications across industries. From common rotating cylinder motors in machinery to specialized linear motors in high-speed trains and MHD drives in propulsion systems, each design serves distinct operational needs. Enclosure types and cooling methods ensure durability in harsh environments, while mounting and coupling mechanisms enable efficient power transmission in everything from household appliances to heavy industrial equipment. Understanding these variations is essential for selecting the right motor for specific applications, ensuring reliability, efficiency, and safety in everything from consumer electronics to large-scale industrial automation.