The article provides an overview of single-phase synchronous motors, focusing on their types—reluctance and hysteresis motors—and their operation principles. It also highlights typical applications of these motors in devices requiring precise, constant speed with low torque.
The primary purpose of single-phase synchronous motors is for constant speed requirements, even though they have very low efficiency. Their use is usually limited to operations where speed is critical and torque requirements are low.
Small synchronous motors are built in a variety of types and constructional details, but are almost invariably one of the two types described below.
Reluctance Motors
The stator winding of the reluctance motor is similar to that of the split-phase or capacitor-start motor and the windings are of the usual squirrel cage type. The rotor, however, is assembled from laminations from which a number of teeth are cut to form definite salient poles. This can be seen in Figure 1(b) where the slots in the rotor lamination will still contain the normal parts of a squirrel cage winding.
The gaps or slots cut in the rotor will often be of unequal sizes to assist the starting function. Note that the number of poles in the stator are not necessarily equal to the number of poles on the rotor.
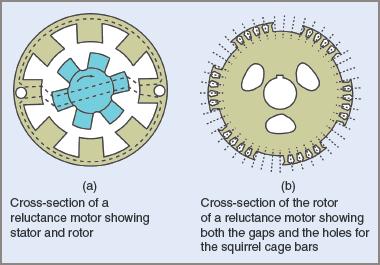
Figure 1 Internal configuration of a reluctance motor
The motor starts as an induction motor and the starting winding is open-circuited by the centrifugal switch at approximately 75 per cent synchronous speed. Because the load applied to this type of motor is comparatively light there is small slip.
The salient rotor poles tend to become magnetized by the stator poles and become locked together. The stator poles are changing at twice the supply frequency. The rotor is attracted by the stator poles during the periods of the cycle when they are fully magnetized.
During the period when the stator flux is low, the inertia of the rotor carries it past the position of one stator pole and it is then attracted by the next stator pole during the buildup of the stator flux. Each rotor pole therefore travels through the space of two stator poles per cycle of supply frequency.
The reluctance motor starts as an induction motor, locks into synchronism, and continues to run at a constant synchronous speed. If the number of salient poles on the rotor is some multiple of the stator poles, the motor will operate at a constant speed which is a sub-multiple of the synchronous speed. This is called a sub synchronous reluctance motor.
Hysteresis Motors
In the hysteresis motor, the rotor is constructed from an especially hardened steel cylinder instead of the normal thin laminations. It is supported on a non-magnetic form called an arbor and has substantial hysteresis losses.
The effect of hysteresis is thereby increased and opposes any change in magnetic polarities of the rotor once they are established. The rotor poles lock into the stator poles of the opposite polarities. The details of the rotor are shown in Figure 2.
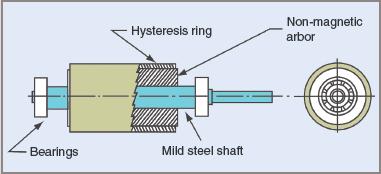
Figure 2 Rotor arrangements for a hysteresis motor
Normally a synchronous motor has no starting torque and is therefore not self-starting without additional means. One method of providing movement for the rotor is to use the shaded-pole principle.
The movement of the stator flux across the pole face pulls the rotor along with it. Because the stator and rotor fluxes are magnetically locked together, the rotor runs at a synchronous speed determined by the number of stator poles and the supply frequency.
Applications for Single-Phase Synchronous Motors
Typical uses of single-phase synchronous motors are in wireless and radio communication installations, recording devices, electric clocks and synchronous servo-systems. A further use is in the aircraft industry where AC frequencies are normally around 400 Hz, although they can be much higher.
As a rule of thumb, the size of AC equipment operating at 400 Hz is reduced (400/50)2 times when compared with the usual power line frequencies; that is, the amount of iron in the core is reduced approximately 64 times. This results in a major reduction in size and weight. Typical applications are in gyro-compasses and other aircraft instrumentation.
Single-Phase Synchronous Motor Key Takeaways
Single-phase synchronous motors play a crucial role in applications where constant speed is essential and torque demands are minimal. Despite their low efficiency, their precision and reliability make them ideal for use in timekeeping devices, communication equipment, and specialized systems such as aircraft instrumentation, where consistent performance and compact size are vital.