The article discusses common causes of electric motor failure, highlighting factors such as overheating, phase and voltage unbalance, single-phasing, surge voltages, and improper ventilation. It emphasizes the importance of proper motor selection, load management, and preventive measures to maintain motor reliability and prevent damage.
Electric Motor failure occurs due to overheating, phase unbalance, voltage unbalance, single-phasing, surge voltages, poor ventilation, lack of lubrication, overloads, over cycling, excessive moisture, improper belt tension, misalignment and vibration, loose connections, pests, etc. Incorrect Electric motor selection for the application and motor defects can also cause motor failure.
Electric motors are highly effective and reliable drivers of machinery and other types of equipment. However, motors fail at times. Electric Motor manufacturers have found that overloading is the number one cause of motor failure.
Thirty percent of all motors fail due to overloading. An Electric motor is overloaded anytime it is required to deliver more power than it was designed for. The most common type of overloading is placing too large of a load on the motor.
Other types of electric motor failure include single-phasing, contaminants, old age, bearing failure, rotor failure, etc. Miscellaneous motor failures account for 9% of all motor failures. Misaligned sheaves is a common cause of miscellaneous electric motor failures. See Figure 1.

Figure 1. Overloading is the leading cause of electric motor failure.
Heat
Excessive heat is a major cause of Electric motor failure and a sign of other motor problems. Heat degrades motor insulation. When motor insulation is degraded, the windings are shorted, and the electric motor is no longer functional.
As the heat in an electric motor increases beyond the temperature rating of the insulation, the life of the insulation is shortened. The higher the temperature, the sooner the insulation will fail. The temperature rating of electric motor insulation is listed as the insulation class.
The insulation class is given in Celsius (centigrade) (°C) and/or Fahrenheit (°F). The electric motor nameplate typically lists the insulation class of the motor. See Figure 2.

Figure 2. The insulation class of electric motors is given in °C and/or °F.
Heat buildup in a motor can be caused by several factors, including the following:
- Incorrect motor type or size for the application
- Improper cooling, usually from dirt buildup
- Excessive load, usually from improper use
- Excessive friction, usually from misalignment or vibration
- Electrical problems, typically voltage unbalance, phase loss, or surge voltages
Phase Unbalance
Phase unbalance is the unbalance that occurs when power lines are out-of-phase. Phase unbalance of a 3φ power system occurs when 1φ loads are applied, causing one or two of the lines to carry more or less of the load.
The loads of 3φ power systems are balanced by the electricians during installation. However, as additional 1φ loads are added to the system, an unbalance begins to occur. This unbalance causes the 3φ lines to move out-of-phase and are consequently no longer 120 electrical degrees apart.
Phase unbalance causes 3φ electric motors to run at temperatures higher than their listed ratings. The greater the phase unbalance, the greater the temperature rise. These high temperatures produce insulation breakdown and other related problems. See Figure 3.
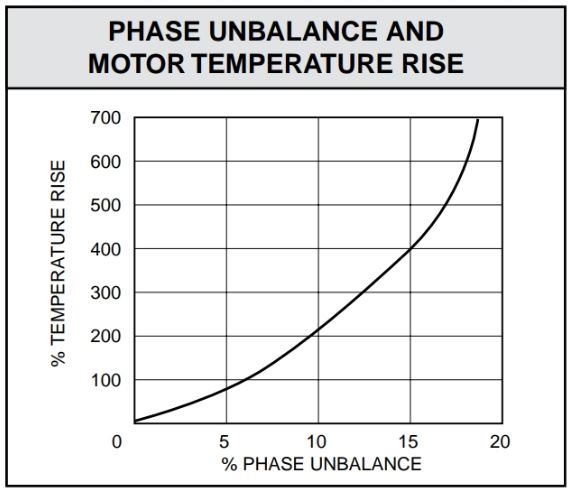
Figure 3. As phase unbalance increases, the motor temperature increases.
Three-phase electric motors cannot deliver their rated horsepower when a system is unbalanced. For example, a phase unbalance of 3% can cause a motor to work at only 90% of its rated power, requiring the motor to be derated for any given application. See Figure 4.

Figure 4. Electric Motors with a phase unbalance require derating.
Voltage Unbalance
Voltage unbalance is the unbalance that occurs when the voltages at the electric motor terminals are not equal. This voltage unbalance can range from as little as a few millivolts to full voltage loss on one power line.
If the voltage is not balanced, one winding will overheat, causing thermal deterioration of that winding insulation. The voltage unbalance results in a current unbalance.
Voltage should be checked for voltage unbalance periodically and during all service calls. Whenever more than 2% voltage unbalance is measured, always complete the following:
- Check the surrounding power system for excessive loads connected to one line.
- Notify the power company.
- If the voltage unbalance cannot be corrected, adjust the load or motor rating by reducing the load on the motor or oversizing the motor.
Voltage unbalance is measured by taking a voltage reading between each of the incoming power lines. The readings are taken from L1 to L2, L1 to L3, and L2 to L3.
The voltages are added together and divided by 3 to find the voltage average. The voltage deviation is found by subtracting the voltage average from the voltage with the largest deviation from the average.
Using these figures, voltage unbalance is found by applying the following formula:
\[{{V}_{u}}=\frac{{{V}_{d}}}{{{V}_{a}}}\times 100%\]
Where
Vu = voltage unbalance (%)
Vd = voltage deviation (V)
Va = voltage average (V)
100 = constant
The technician can observe the blackening of one or two of the stator windings, which occurs when a motor has failed due to voltage unbalance. See Figure 5.
If a large unbalance exists on one winding, it is darkened the most. If the unbalance is divided over two windings, they are both darkened. The winding that had the largest unbalance is the darkest.
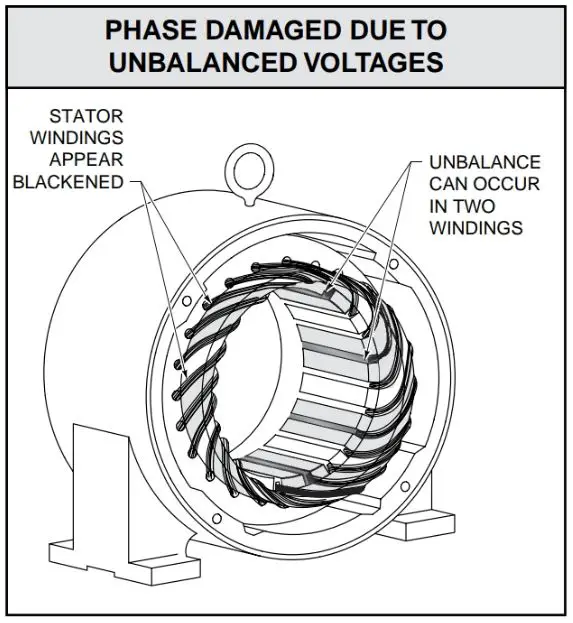
Figure 5. Voltage unbalance causes blackening of one or two of the stator windings.
Single‐Phasing
When one of the 3φ lines leading to a 3φ electric motor no longer delivers voltage to the motor, the motor will single phase. Single-phasing is the operation of an electric motor designed to operate on three phases operating on only two phases. Since one phase is lost, it is the worst condition of voltage unbalance.
Single-phasing occurs when one phase opens on either the primary or secondary side of the power distribution system. This can happen when one fuse blows, there is a mechanical failure in the switching equipment, or lightning takes out one of the lines.
A 3φ phase electric motor running on two phases will continue to run in most applications. Therefore, single-phasing can go undetected on most systems for a long enough time to burn out a motor. When single-phasing, the motor will draw all its current from two of the lines.
Measuring the voltage at the motor will not usually detect a single-phasing condition. The open winding in the electric motor generates a voltage almost equal to the phase voltage that was lost. In this case, the open winding acts as the secondary of a transformer, and the two windings connected to power act as the primary.
Single-phasing can be reduced by using the proper size of the dual‐element fuse and by using the correct heater sizes.
In electric motor circuits or other types of circuits in which a single-phasing condition cannot be allowed to exist for even a short period of time, an electronic phase-loss monitor is used to detect phase loss. When a phase loss is detected, the monitor activates a set of contacts to drop out the starter coil.
The technician can observe the blackening of one of the 3φ windings (coils), which occurs when a motor has failed due to single-phasing. See Figure 6. The coil that experienced the voltage loss will indicate obvious and fast damage, which includes the blowing out of the insulation on the one winding.
Single-phasing is distinguished from voltage unbalance by the severity of the damage. Voltage unbalance causes less blackening (but usually over more coils) and little or no distortion. Single-phasing causes severe burning and distortion to the one-phase coil.
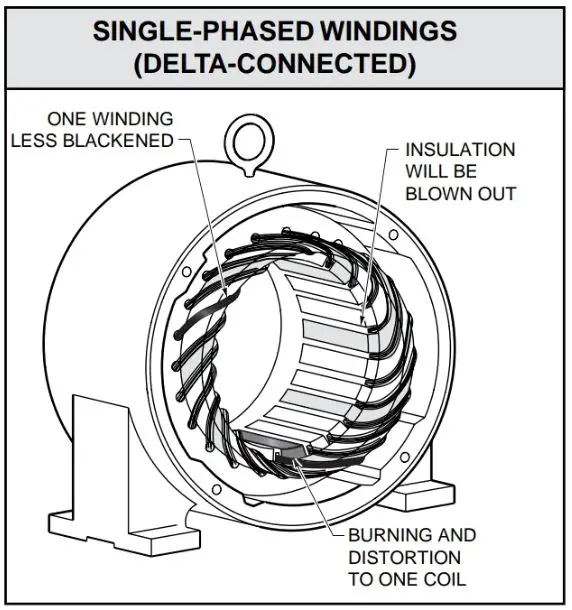
Figure 6. Single-phasing causes severe burning and distortion to the one-phase coil.
Surge Voltages
Surge voltage is any higher-than-normal voltage that temporarily exists on one or more of the power lines. Lightning is a major cause of large surge voltages. A lightning surge on the power lines comes from a direct hit or induced voltage.
The lightning energy moves in both directions on the power lines, much like a rapidly moving wave. This traveling surge causes a large voltage rise in an extremely short period of time. The large voltage does the most damage on the first few turns of the motor windings, destroying the insulation and burning out the motor.
The technician can observe the burning and opening of the first few turns of the windings, which occur when a motor has failed due to a voltage surge. See Figure 7. The rest of the windings appear normal, with little or no damage.
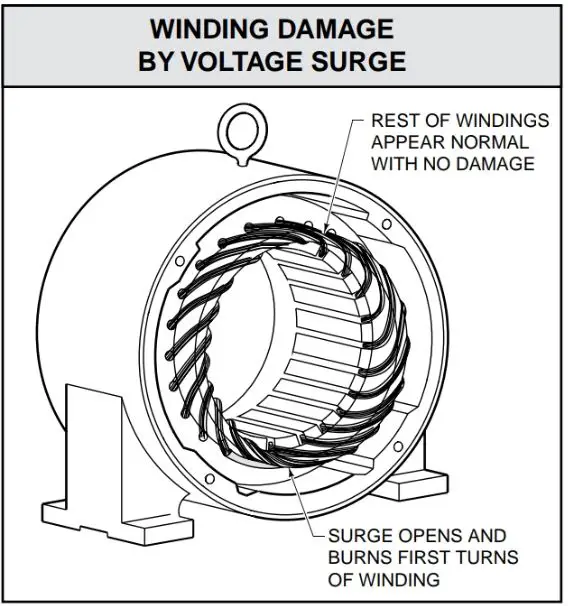
Figure 7. Voltage surge causes burning and an opening of the first few turns of the windings.
Lighting arresters with the proper voltage rating and connection to an excellent ground assure maximum protection. Surge protectors are also available. These are placed on the equipment or throughout the distribution system.
Voltage surges can also occur from normal switching of higher-rated power circuits. These are of much less magnitude than lightning strikes and usually, do not cause any problems in motors. A surge protector should be used on circuits with computer equipment to provide protection to sensitive electronic components.
Improper Ventilation
All electric motors produce heat as they convert electrical energy into mechanical energy. This heat must be removed, or it will destroy the motor insulation, and consequently the motor.
Motors are designed with air passages that permit a free flow of air over and through the motor. This airflow removes the heat from the motor. Anything that restricts airflow through the motor causes the motor to operate at a higher temperature than it is designed for.
Airflow may be restricted by the accumulation of dirt, dust, lint, grass, pests, rust, etc. If the motor becomes coated with oil from leaking seals or from over-lubrication, airflow is restricted much faster. See Figure 8.
Overheating can also occur if the electric motor is placed in an enclosed area. When a motor is installed in a location that does not permit the heated air to escape, the motor will overheat due to the recirculation of the heated air.
Vents can be added at the top and bottom of the enclosed area to allow a natural flow of heated air.
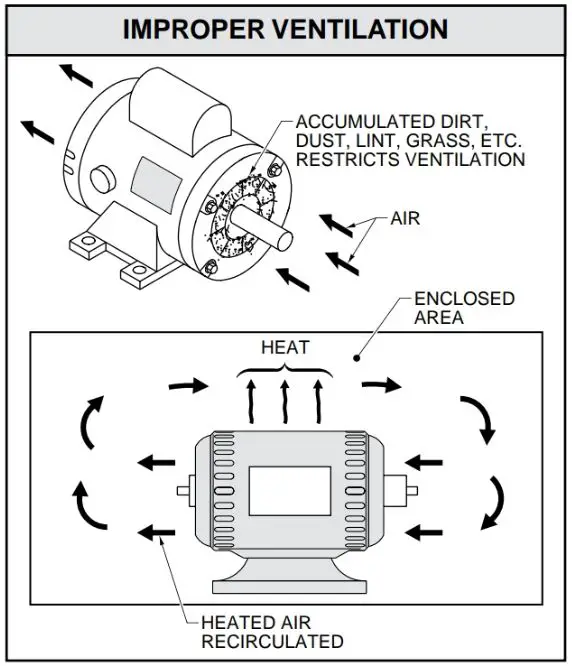
Figure 8. Improper ventilation causes overheating of motors.
Overloads
An overload is a condition that occurs when the load connected to the electric motor exceeds the full-load ampere rating of the motor. Electric Motors attempt to drive the connected load when the power is on. The larger the load, the more power is required.
All motors have a limit to the load they can drive. For example, a 5 HP, 460 V, the 3φ motor should draw no more than 7.6 A.
Overloads should not harm a properly protected motor. Any overload that is present longer than the built-in time delay of the protection device will be detected and removed. Properly sized heaters in the motor starter ensure that an overload is removed before any damage is done. See Figure 9.
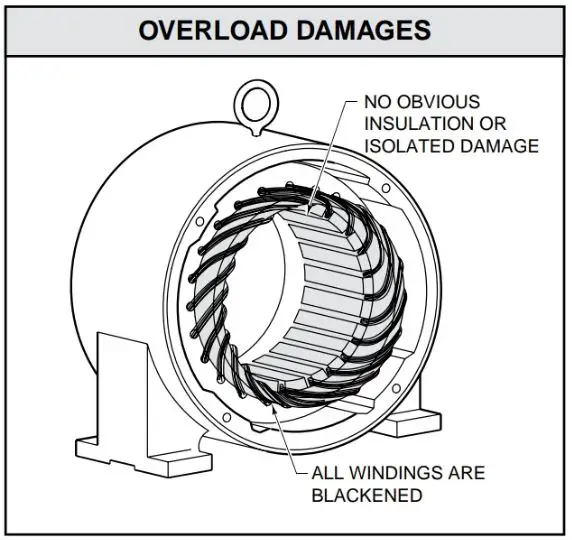
Figure 9. Overloading causes an even blackening of all windings.
The technician can observe the even blackening of all motor windings, which occurs when an electric motor has failed due to overloading.
The even blackening is caused by the slow destruction of the motor over a long period of time. There is no obvious damage to the insulation, and there are no isolated areas of damage.
Current readings are taken at the motor to determine an overload condition. See Figure 10. If the electric motor is drawing rated current, the motor is working to its maximum.
If the motor is drawing more than the rated current, the motor is overloaded. If overloads become a problem, the motor size may be increased, or the load on the motor decreased.
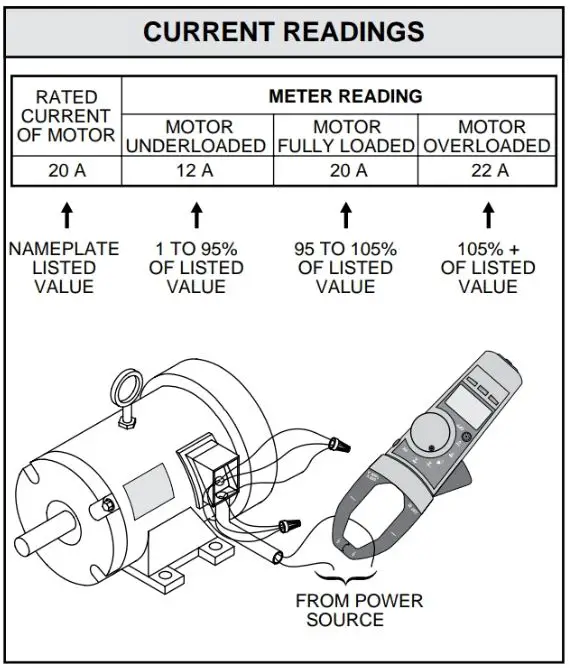
Figure 10. Current readings are taken at the motor to determine an overload problem.
Over-Cycling
Overcycling is the process of turning an electric motor on and off repeatedly. See Figure 11. Electric Motor starting current is usually five to six times the full-load running current of the motor. Most motors are not designed to start more than ten times per hour.
Over-cycling occurs when an electric motor is at its operating temperature and still cycles on and off. This will further increase the temperature of the motor, destroying the motor insulation.
Totally enclosed motors can better withstand overcycling than open motors because they can withstand heat longer.
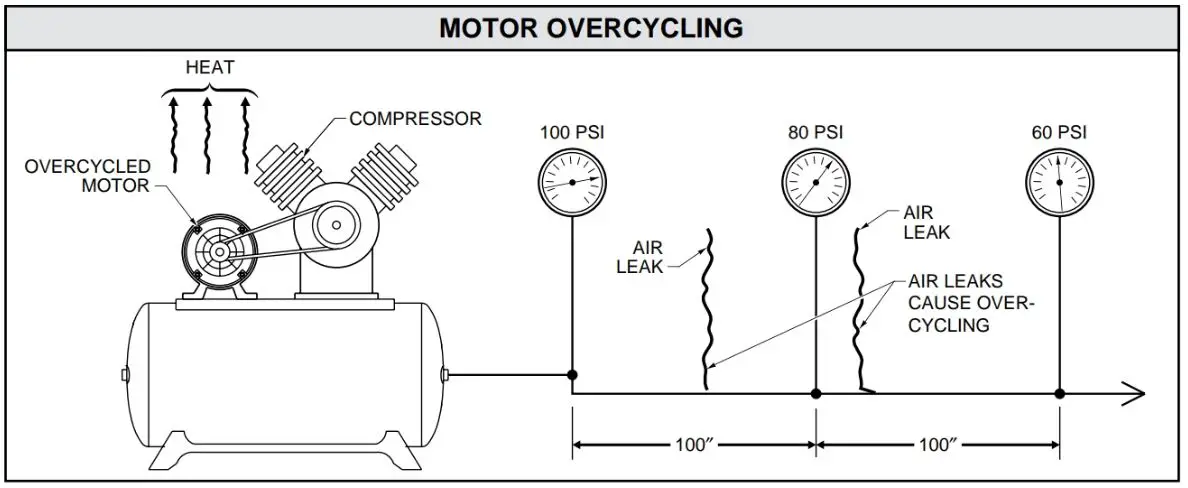
Figure 11. Over-cycling occurs when an electric motor is repeatedly turned on and off.
The following procedure should be followed when a motor application requires a motor to be cycled often:
- Use a motor with a 50°C rise, instead of the standard 40°C.
- Use a motor with a 1.25 or 1.35 service factor, instead of a 1.00 or 1.15 service factor.
- Provide additional cooling by forcing air over the motor.
Moisture
Moisture causes metal parts to rust and motor coil insulation to lose some of its insulating properties. An electric motor cools when it is turned off. This causes air (with its moisture) to be sucked into the motor.
Motors that operate every day will heat enough to remove any moisture inside the motor. Moisture is usually a problem for a motor that is seldom operated or is shut down for a period of time.
Any electric motor that is not operated on a regular basis should contain a heating element to keep the motor dry. If adding a heating element is not practical, a maintenance schedule calling for short operation of motors that are seldom used should be developed. This schedule should also consider new motor installations, since, in some plants, motors may be installed some time in advance of the plant startup.
Improper Belt Tension
Belt drives provide a quiet, compact, and durable form of power transmission and are widely used in industrial applications. A belt must be tight enough not to slip, but not so tight as to overload the electric motor bearings.
Belt tension is usually checked by placing a straight- edge from sheave to sheave and measuring the amount of deflection at the midpoint, or by using a tension tester. Belt deflection should equal 1/64′′ per inch of the span. For example, if the span between the center of the drive pulley and the center of the driven pulley is 16′′ the belt deflection is 1/4′′ (16 × 1/64′′ = 1/4′′).
If the belt tension requires adjustment, it is usually accomplished by moving the drive component away from or closer to the driven component. This reduces or increases deflection. See Figure 12.
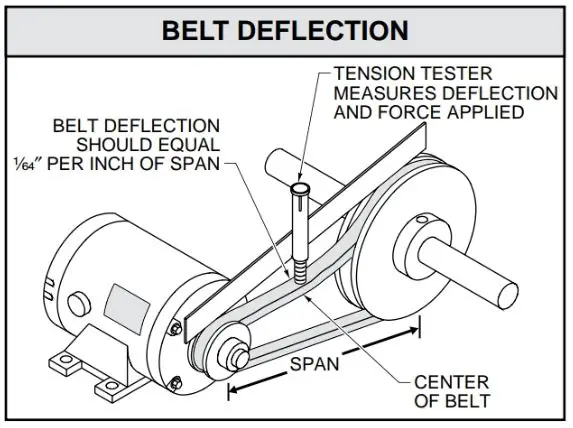
Figure 12. Belt tension is usually checked by measuring deflection.
Misalignment and Vibration
Misalignment of the electric motor and the driven load is a major cause of motor failure. If the motor and driven load are misaligned, premature failure of the motor bearings, load, or both may occur.
Equipment shafts should be properly aligned on all new installations and checked during periodic maintenance inspections. Misalignment is usually corrected by placing shims under the feet of the motor or driven equipment.
If misalignment cannot be corrected, a flexible coupler designed to allow some misalignment can be used. Flexible couplers that can be used in misaligned applications include SURE-FLEX®, universal, and gear. See Figure 13.

Figure 13. Couplers compensate for the misalignment of the electric motor and driven load.
Loose Connections.
All electric motors produce vibration as they rotate. This vibration can loosen mechanical and electrical connections. Loose mechanical connections generally cause noise and can be easily detected.
Loose electrical connections do not cause noise but do cause a voltage drop to the motor and excess heat. Always check mechanical and electrical connections when troubleshooting a motor.
Pests
An electric motor that is turned off remains warm for some time. This warmth can attract insects, snakes, and rodents. These pests can damage a motor by restricting ventilation or corroding the insulation. In the highest areas, a special zip‐seal jacket can be placed around the motor.
Incorrect Electric Motor
Each motor type has its advantages and disadvantages. For any given application, one type of motor generally offers the best performance. If a motor has a recurring problem, consider the application in which it is used. A change of electric motor type may be required for better service.
Electric Motor Failure Causes Key Takeaways
Understanding the causes of electric motor failure—such as overheating, voltage and phase unbalance, single-phasing, surge voltages, and improper ventilation—is crucial for maintaining system efficiency and extending motor life. These factors not only lead to increased operational costs and downtime but also compromise the safety and reliability of electrical systems. In practical applications, electric motors are the backbone of countless industrial, commercial, and residential systems—from manufacturing lines and HVAC systems to water pumps and elevators. Ensuring proper motor selection, regular maintenance, load management, and timely troubleshooting is essential to avoid failures that can halt critical operations.